Cambios en los parámetros para adecuar el aspecto de tus simulaciones a las condiciones de la vida real
Como líder en el espacio de iluminación automotriz, queríamos compartir algunos consejos sobre cómo maximizar los beneficios de nuestro software de simulación. Al ajustar los parámetros para que se ajusten mejor a su área de aplicación, está haciendo más para crear las condiciones adecuadas para un diseño basado en la confianza.
A través de las preguntas de los clientes, exploraremos los cambios de parámetros para maximizar la percepción de los resultados de su simulación en el contexto de un ejemplo de iluminación exterior automotriz: un modelo de lámpara trasera en Ansys Speos.
¿Qué factor tiene más influencia sobre la calidad y la velocidad de mi simulación?
el sensor La configuración adecuada del sensor puede cambiar drásticamente los resultados de su simulación. Si ha realizado el esfuerzo de construir un modelo físicamente preciso y de alta fidelidad, asegúrese de aprovechar todo lo que el modelo tiene para ofrecer. Si está viendo resultados con una resolución de 1080 píxeles en un monitor 4K, habrá una pixelación notable y falta de nitidez. A menos que esté buscando una imagen rápida y de baja fidelidad, no reduzca la resolución de sus resultados y pierda calidad.
El muestreo es el parámetro principal que debe tener en cuenta. Un muestreo más alto significa un resultado más suave y hermoso, pero requiere un tiempo de simulación más largo. Por ejemplo, si duplica el muestreo de X e Y en la Figura 1, necesita cuatro veces más tiempo de simulación para obtener sus resultados.

Figura 1: Configuraciones de muestreo para resultados de simulación más suaves.
Algunos recordatorios:
- + Un resultado «suave» es un mínimo de 1920 píxeles (es decir, muestreo) para el lado más largo del sensor.
- + Para píxeles cuadrados, la resolución del lado más corto del sensor debe ser la misma que la del lado más largo.
- + Si está ampliando los resultados al acercar el zoom, su muestra debe ser de alrededor de 4000 píxeles, de modo que los resultados se mantengan uniformes en condiciones ampliadas.
- + En el caso de los sensores de radiación, recomendamos colocar el marco lo más cerca posible del objeto (lámpara) y lo más lejos posible del punto de vista para lograr una gran distancia focal.
¿Qué configuraciones puedo cambiar para mejorar la calidad de la malla de mi simulación?
En un ensamblaje físico, todos los componentes están físicamente unidos o fabricados (por ejemplo, sobremoldeados) con algún grado de tangencia. Los datos de diseño asistido por computadora (CAD) utilizados para la simulación de Speos se teselan de acuerdo con la configuración de malla definida; por lo tanto, la precisión original del modelo CAD cambia. Una malla fina es fundamental para reducir los artefactos causados por conflictos de volumen y/o espacios (Figura 2).
Existen opciones, configuraciones y parámetros específicos que pueden ayudarlo a aprovechar al máximo su simulación. Los parámetros predeterminados funcionan bien, pero si tiene un gran error durante la simulación (es decir, más del 10 %), debe cambiar las tolerancias geométricas. El error grande es más común en las geometrías LED y otras geometrías en miniatura. Si ejecuta su simulación y aún obtiene grandes errores o espacios inesperados, puede ajustar el valor de hundimiento de mallado y/o el valor de paso de mallado hasta un valor fijo de 0,01 milímetros.

Figura 2: En ensamblajes físicos, una malla fina reduce los artefactos causados por conflictos de volumen y/o espacios.
Cuando utilice una guía de luz o un material difusor que pueda generar muchos impactos, aumente el número máximo de interacciones de superficie hasta 1000 haciendo clic con el botón derecho en Simulación > Opciones > Simulación.
¿Qué tipo de simulación recomienda: directa o inversa?
En resumen, recomendamos ejecutar tanto la simulación directa como la inversa, ya que ambas tienen sus ventajas.
Al intentar evaluar la apariencia encendida de una lámpara, el sensor generalmente se ubica en una posición donde pasan muchos rayos. Bajo esas condiciones, la simulación directa es un método más rápido para recolectar rayos y lograr resultados con menos ruido. La simulación directa también es ventajosa porque puede usar múltiples sensores en una sola simulación sin aumentar el tiempo de simulación. Ese no es el caso en una simulación inversa porque el tiempo de simulación se multiplica por la cantidad de sensores.
En cada pasada, la simulación inversa genera rayos entre un punto focal del sensor y cada píxel de la cara frontal. Si el sensor cubre un área grande fuera de la lámpara, muchos rayos no contribuirán a la apariencia iluminada. En los casos en que el sensor es pequeño y cubre el área de la lámpara, la simulación inversa puede ser tan eficiente como la simulación directa. Dicho esto, en el diseño de vehículos, el sensor generalmente se fabrica para contener la carrocería y el fondo del automóvil.
¿Cuáles son las configuraciones más ventajosas para la simulación directa?
Reunión
La recopilación mejora el rendimiento de la simulación al permitir la recopilación de sensores y mejorar la tasa de convergencia para los sensores de radiancia o luminancia. Gathering es un parámetro dedicado y no editable, pero siempre está activo.
Ángulo de integración
Gathering no puede proporcionar los mismos beneficios con una superficie especular, por lo que se recomienda un cono de integración para obtener cierta aproximación. Si la desviación angular del rayo hacia el punto focal («rayo virtual» en la figura 3) es menor que el ángulo de integración, el rayo alcanza el punto focal. Si el ángulo de integración es demasiado grande, los rayos convergen más rápido, pero los resultados son borrosos. Si el ángulo de integración es demasiado pequeño, los rayos convergen más lentamente, pero los resultados son más precisos.
Un ángulo de integración de dos grados suele ser un buen valor para la mayoría de las aplicaciones de iluminación automotriz. Sin embargo, debe evaluarse para encontrar la mejor relación entre calidad y tiempo de cálculo.

Figura 3: Comparación de la salida de la simulación en diferentes ángulos de integración.
Reunión de transmisión rápida (FTG)
Las lámparas de automóviles siempre tienen una lente exterior con una superficie especular, por lo que la acumulación se cancela en el impacto en la lente exterior y los rayos se calculan con el cono de integración. Los componentes ópticos como los reflectores también tienen una propiedad óptica especular. Si hay una lente exterior en el diseño, el cono de integración se calcula en la lente exterior, a menudo con resultados borrosos. Esto se puede remediar reduciendo el ángulo de integración; sin embargo, la simulación llevará más tiempo sin usar FTG.
Para mantener el ángulo de reunión e integración, habilite FTG. FTG permite que los rayos ignoren la refracción en la lente exterior. Siempre que la lente exterior esté hecha de superficies paralelas con espesores consistentes, ignorar la refracción tiene poco impacto en la precisión. Aún se consideran la reflexión y la absorción en la lente.
Una vez que haya completado la configuración del sensor y haya seleccionado las opciones de simulación, ¿cuánto tiempo debo ejecutar mi simulación?
En la Figura 4 a continuación, encontrará pautas de longitud para simulaciones inversas y directas. En el caso de una simulación directa, los rayos son una métrica para definir cuánto tiempo puede ejecutarse una simulación; con más rayos, tendrás un modelo de mayor fidelidad. A continuación, brindamos orientación para un estudio aproximado (es decir, durante las iteraciones del diseño), una revisión rápida (es decir, después de un hito semi importante) y una revisión detallada (es decir, en la etapa de validación del diseño). La realización de estas revisiones inspirará confianza en la capacidad de un diseño para cumplir con los requisitos y estándares de calidad.

Figura 4: Directrices para la simulación inversa (arriba) y directa (abajo), desglosadas por fase de diseño.
Ahora que tengo resultados de simulación directa e inversa, ¿cómo puedo aprovecharlos al máximo?
Recomendamos ejecutar una simulación separada para cada función (es decir, cola/freno, indicador de giro, marcha atrás, etc.) y luego unir los resultados usando la operación de unión de mapas de cálculo fotométrico (Figura 5). Sugerencia: puede seleccionar varios archivos a la vez; no es necesario unir solo dos a la vez.
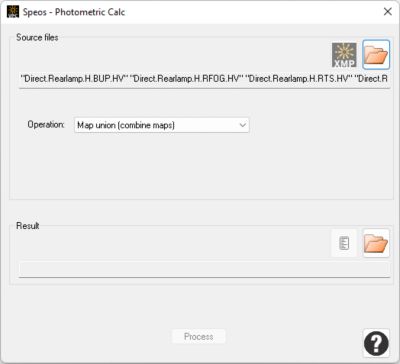
Figura 5: Ventana que le permite unir resultados de simulación separados mediante la operación de unión de mapas.
Este enfoque también ahorra tiempo en caso de que se modifique una función. No es necesario volver a ejecutar la simulación consolidada, simplemente reemplace la función anterior por la nueva (Figura 6).

Figura 6: Método para crear un resultado total cuando se modifica una de muchas funciones.
Recuerde, los rayos se distribuyen en función de la relación del flujo de la fuente, por lo que si realiza una sola simulación que incluye todas las funciones, la función con un flujo más pequeño recibe menos rayos que las demás (por ejemplo, la cola). Evitamos esto simulando cada función de forma independiente y uniendo las funciones separadas. Consulte la Figura 7 para obtener un resultado de ejemplo.

Figura 7: Resultado de simular funciones separadas y unirlas.
¿Qué ajustes de posprocesamiento debo implementar una vez que tenga resultados?
Manejo del color
Es importante implementar configuraciones que optimicen la precisión del color y la saturación del monitor en el que está viendo los resultados. Como se muestra en la Figura 8, un monitor estándar solo puede capturar una pequeña porción del espectro de color. Si el color rojo de la luz trasera está fuera de esa área, los resultados de la imagen aparecen más saturados de lo que realmente son porque el monitor no tiene la capacidad de mostrar los resultados con precisión.

Figura 8: El área dentro del triángulo representa lo que puede mostrar el monitor de la computadora (derecha); la “X” fuera del triángulo marca el color rojo de la luz trasera (izquierda).
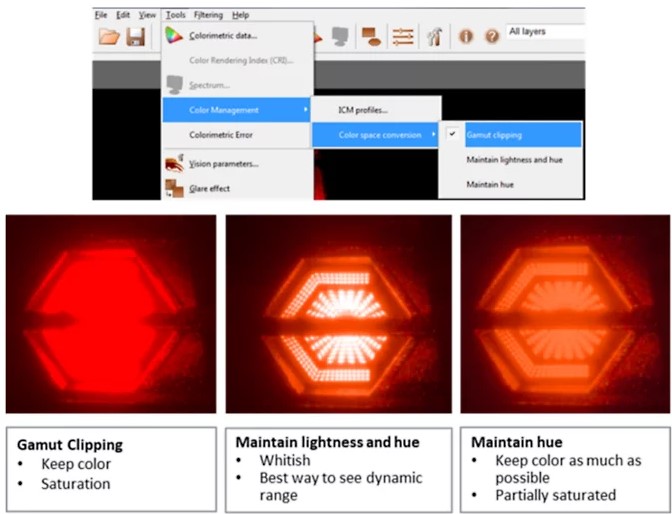
Para las luces traseras y de freno, recomendamos mantener la luminosidad y el tono debido al rango dinámico relativamente alto. Consulte la Figura 9 para ver una representación visual de todas las opciones de conversión de espacios de tres colores en Speos.

Figura 9: Una comparación lado a lado de las opciones de conversión del espacio de color y su impacto en cómo se perciben los resultados de la simulación.
Adaptación
El ojo humano debe adaptarse al nivel de luminancia del entorno. La adaptación considera las capacidades de su pantalla y ajusta el gradiente de los valores de luminancia mostrados. El objetivo es (a) acomodar un valor de luminancia específico (es decir, adaptación local), o (b) imitar la adaptación espacial del ojo mientras escanea diferentes regiones del mapa. La escala lineal de un mapa de luminancia en Ansys Photometric Lab no tiene esta capacidad.
La configuración de tipo de adaptación dinámica 2019 es la mejor práctica cuando su sensor tiene un campo de visión amplio (similar a nuestros ojos reales), por lo que la luminancia general se considera correctamente. Cuando el sensor tiene un campo de visión estrecho, se prefiere la adaptación local. De esa forma, la luminancia general se puede configurar manualmente, ya que el campo de visión reducido contiene solo una fracción de la luminancia general que vería un ojo real (Figura 10).
Destello
El ajuste de efecto de deslumbramiento de Holladay, 1926, ofrece un cálculo más rápido y sencillo; sin embargo, dadas las capacidades informáticas actuales, Vos, 1984 es nuestra configuración recomendada (Figura 10). Si su modelo tiene ruido (por ejemplo, píxeles con alta luminancia), Vos, 1984 puede generar un efecto brillante no deseado. Para anular este efecto, siempre debe incluir una fuente de luz ambiental, incluso si es un nivel bajo de luz. Paralelamente, aumentar el número de rayos también ayudará a eliminar el ruido. Si tiene poco tiempo, use Holladay, 1926 en su lugar para mostrar el brillo de una manera realista.

Figura 10: Configuraciones preferidas de adaptación y deslumbramiento en el Laboratorio Virtual de Visión Humana de Ansys.
Evaluación del modo de visión
Recomendamos que su evaluación del modo de visión se base en el valor máximo de xmp (Figura 11). El valor máximo es mejor para condiciones de manejo nocturno u otros escenarios de baja luminancia porque el valor promedio puede ser bajo, lo que resulta en una visión mesópica o escotópica.
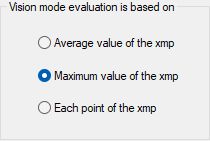
Figura 11: Configuración de evaluación del modo de visión en el laboratorio de visión humana virtual de Ansys.
¿Cómo deben ser mis resultados?
Estos son los resultados que puede esperar al seguir las mejores prácticas que hemos cubierto aquí (Figura 12). Si está interesado en la experimentación práctica, puede acceder a este modelo a través de nuestro tutorial. Pruébelo usted mismo aquí.

Figura 12: Resultados de la simulación cuando se implementan todos los parámetros sugeridos.
You May Also Like
Ansys Discovery | Usando Block Recording para parametrizar un modelo 3D en Discovery Modelling
La parametrización de un modelo 3D puede resultar muy útil para estudiar distintas configuraciones
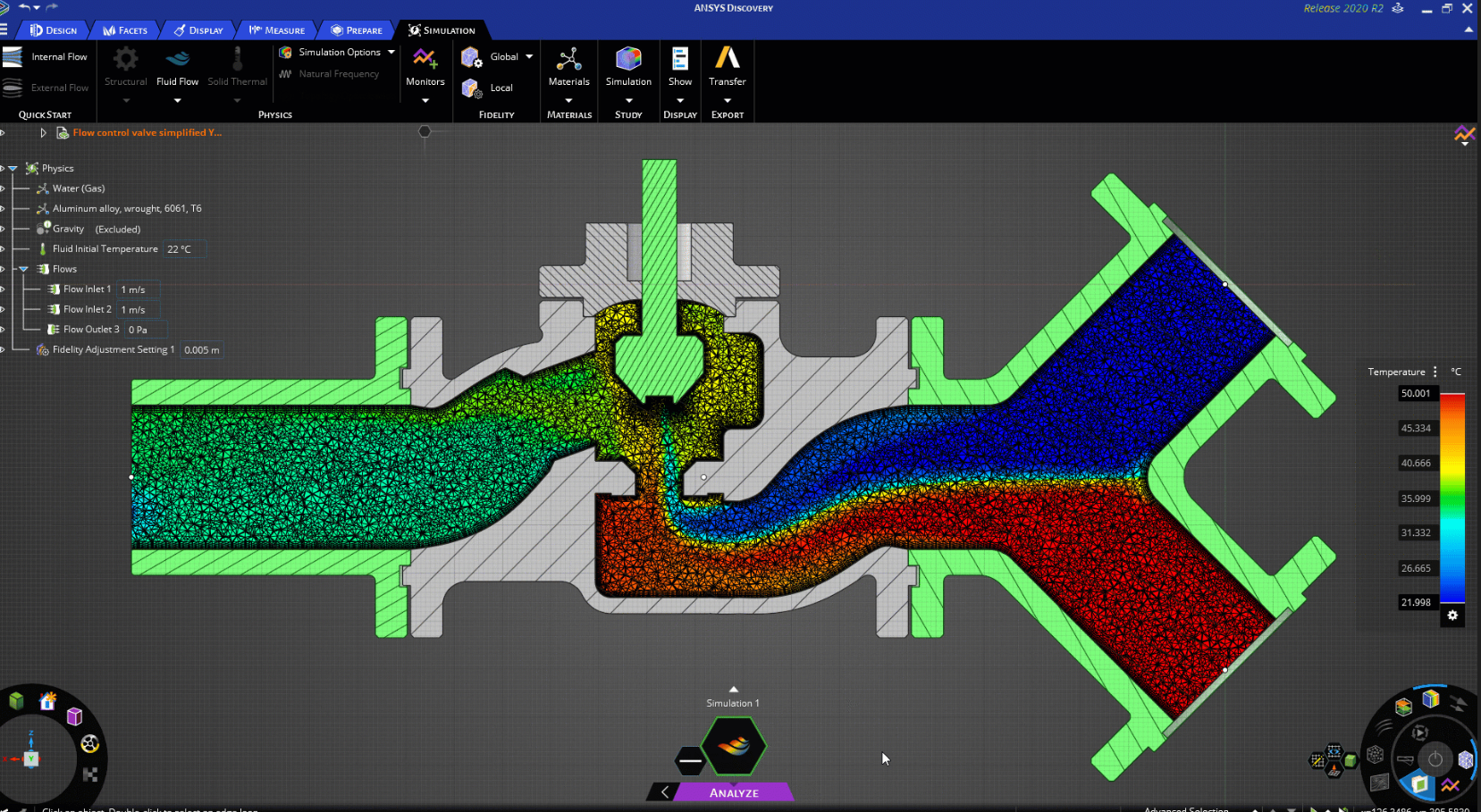
Reduce costes en pruebas físicas garantizando la eficiencia de la válvula de control mediante la simulación
La simulación desempeña un papel clave en el diseño de una válvula de control con una capacidad
NX CAD | Creación y gestión de unidades
Muchas veces necesitamos que nuestras medidas se tomen en una determinada unidad, así nos ahorramos